

赵 航
机器人开发工程师
"知不足而奋进, 望远山而前行。"
持续学习 无限进步

一名充满热情并热爱探索的机器人开发工程师,现居北京。
拥有持续4年的机器人开发经验,我专注于运用 C++/Python、ROS 和 Qt 构建高效可靠的机器人应用。 研究生毕业后进入国家级研究所从事软件开发工作,负责的核心软件模块实现了交付军方零故障记录,这锻炼了我严谨的工程素养。
持续追踪LLM Agent与具身智能等前沿动态,致力于在机器人领域不断学习与创造价值。
机械工程硕士
2020.09 - 2023.06
机械工程学士
2015.09 - 2019.06
优秀共青团员、优秀共青团干部、2020年度校研会“优秀个人”、机械工程学院研究生会主席团成员、第十五届研究生代表大会机械学院研究生代表、优秀(三好)毕业生
专利:一种多功能康复车
专利:一种辅助手脚康复锻炼的座椅

荣誉:优秀共青团员
荣誉:优秀共青团干部
荣誉:校研会“优秀个人”
聘书:学院研会主席团成员
荣誉:优秀(三好)毕业生
软件设计工程师 | 2023.07 - 至今
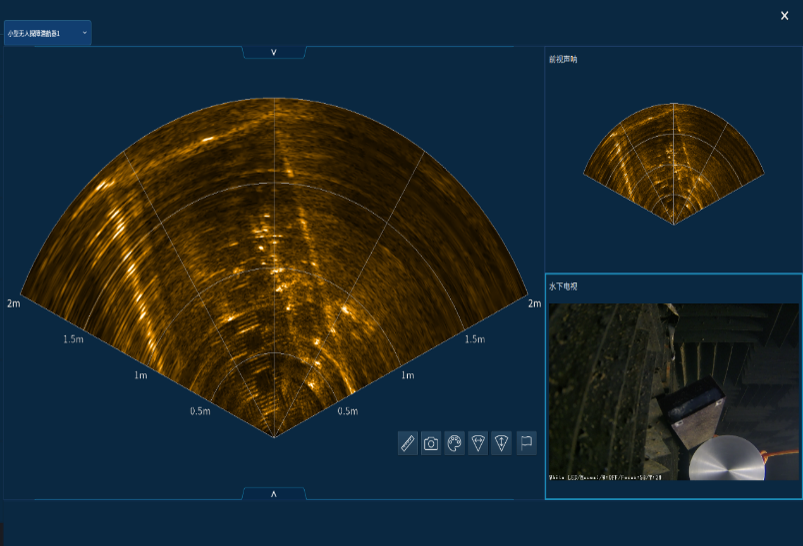
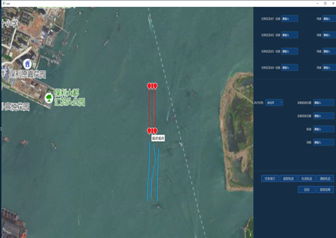
负责UUV地面操控软件与潜航器端主控软件的研发。已获得比测第一名进入研制阶段。
负责核心Android软件研发,成功交付374套设备,负责模块零反馈问题。
 最佳新员工 (2023)
最佳新员工 (2023)
 优秀师徒 (2023-24)
优秀师徒 (2023-24)
 重大任务保障奖
重大任务保障奖
软件开发工程师 (实习) | 2022.07 - 2022.10
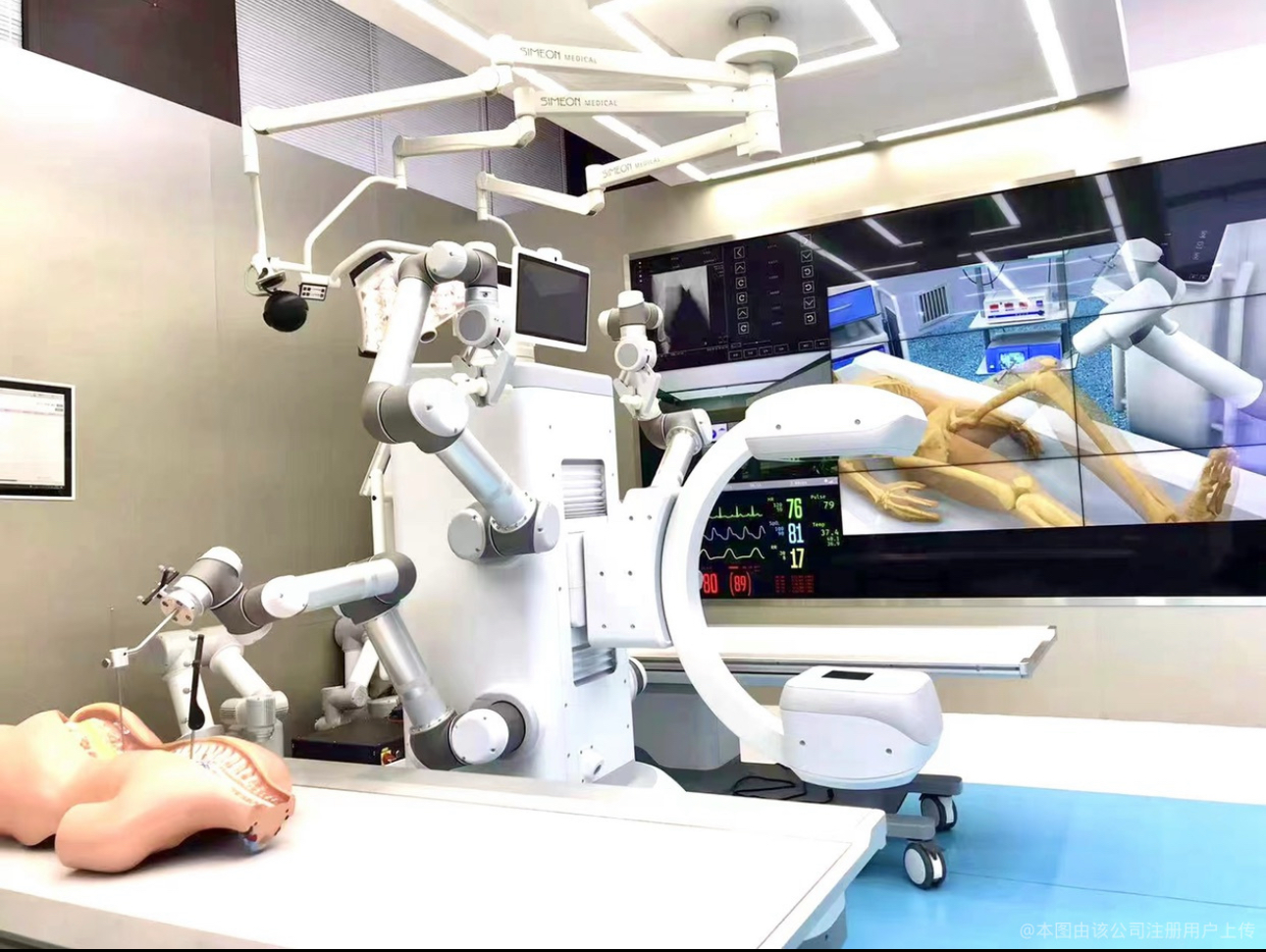
参与全膝置换术(TKA)骨科手术机器人的研发。
 优秀实习生
优秀实习生
时间:2024.03
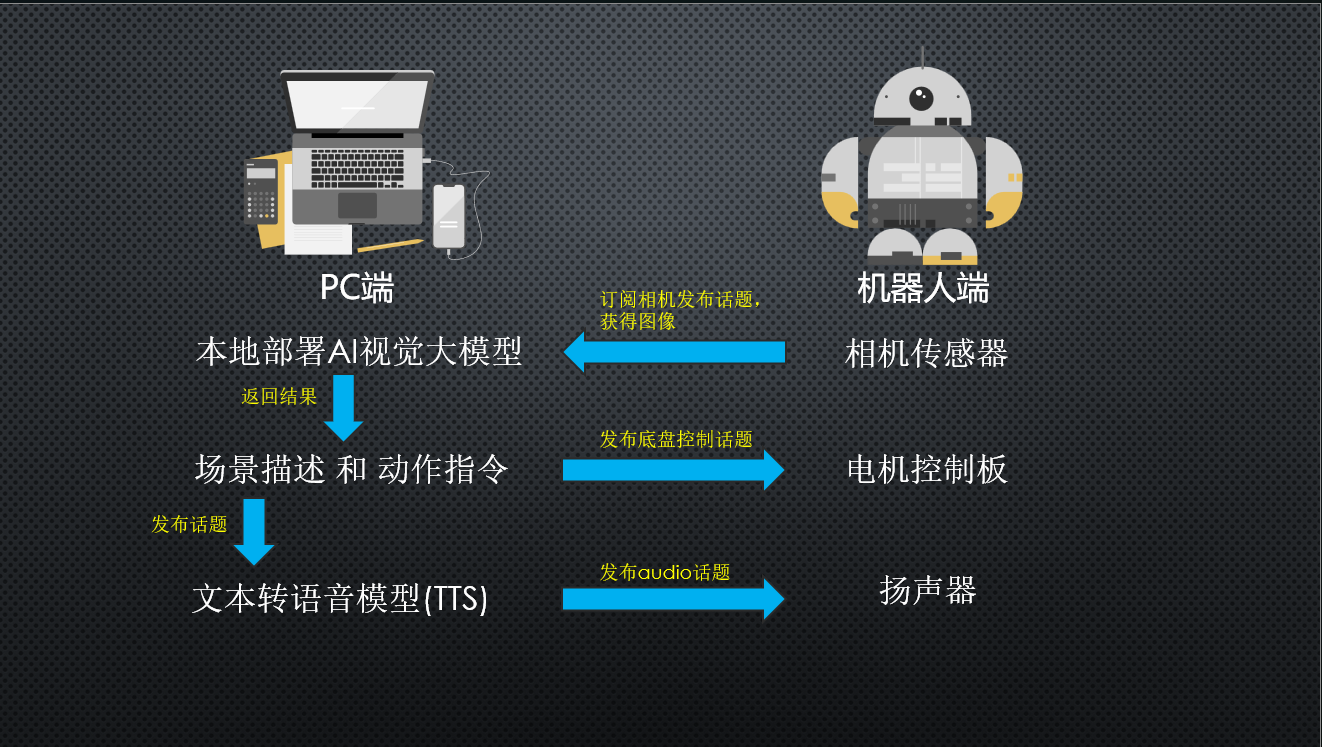
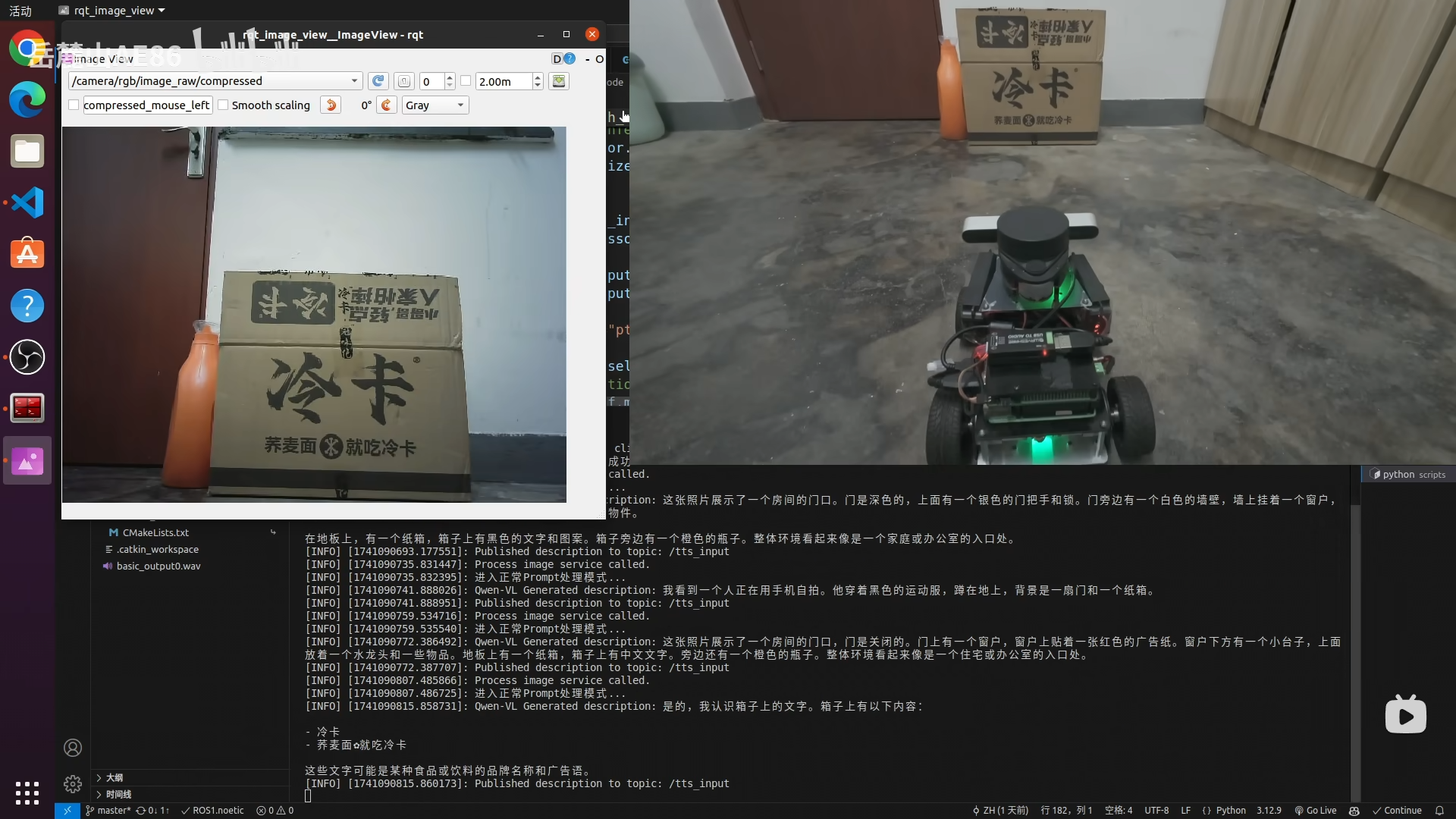
从零到一设计并实现机器人大脑系统,实现多模态视觉 (LLaVA, Qwen2.5-VL) 与语音 (STT/TTS) 模型在本地PC的高效运行与深度集成。该系统使机器人能够在完全离线的情况下,完成复杂的视觉环境理解、自然语言交互及动作指令生成与执行,达成端到端AI调用流程秒级响应。 B站 7000+播放 & 1600+互动
时间:2024.03
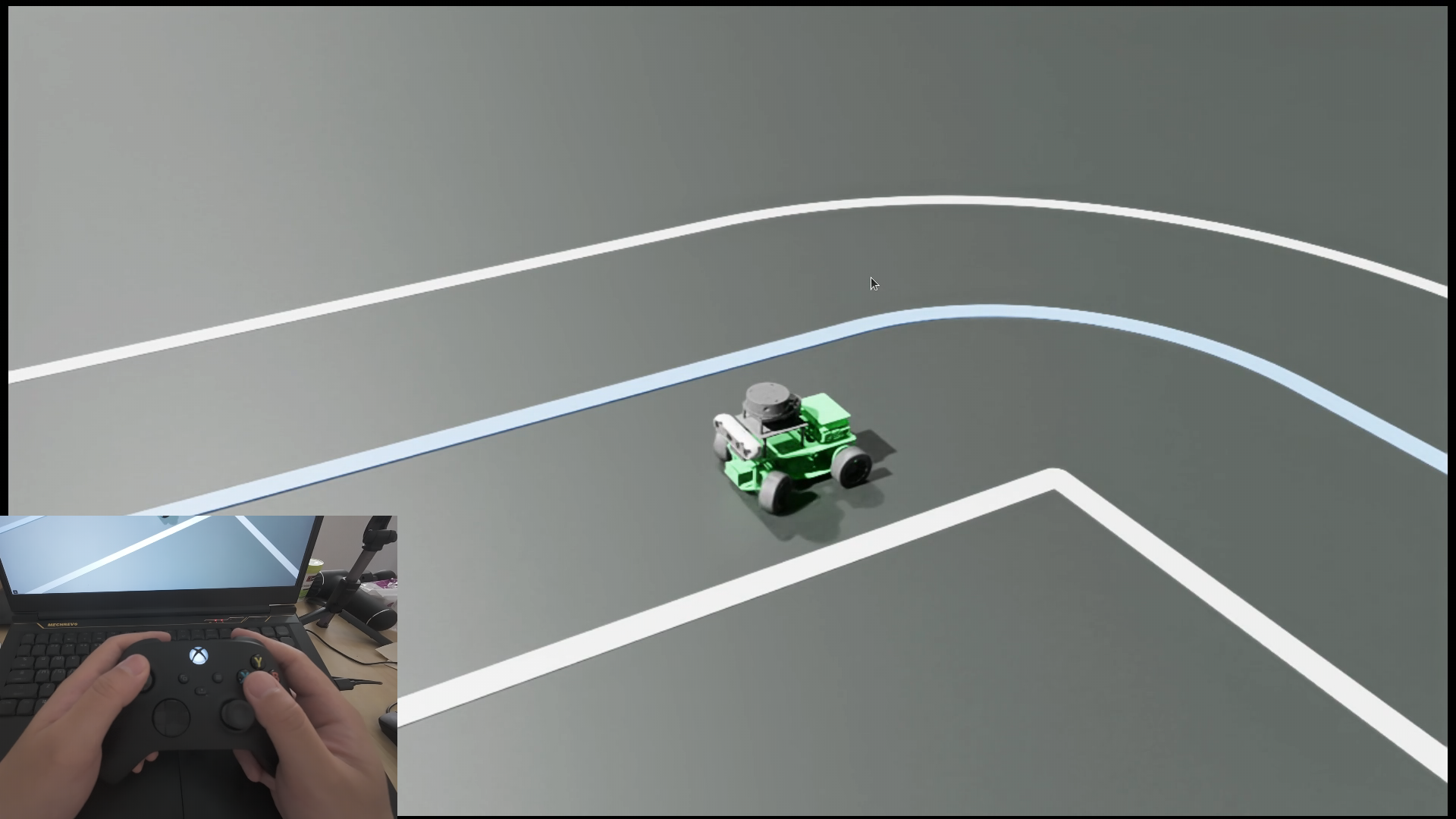
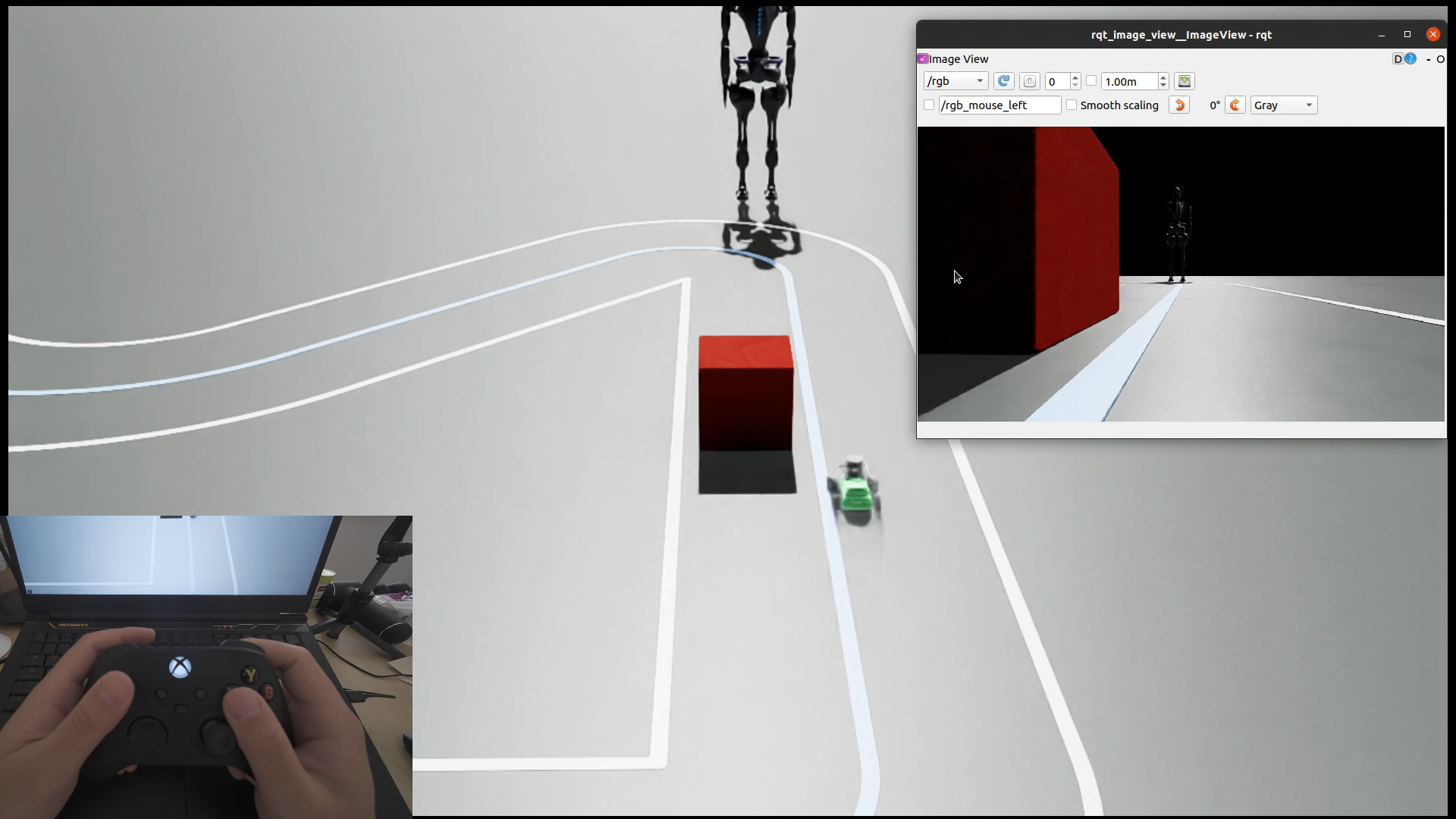
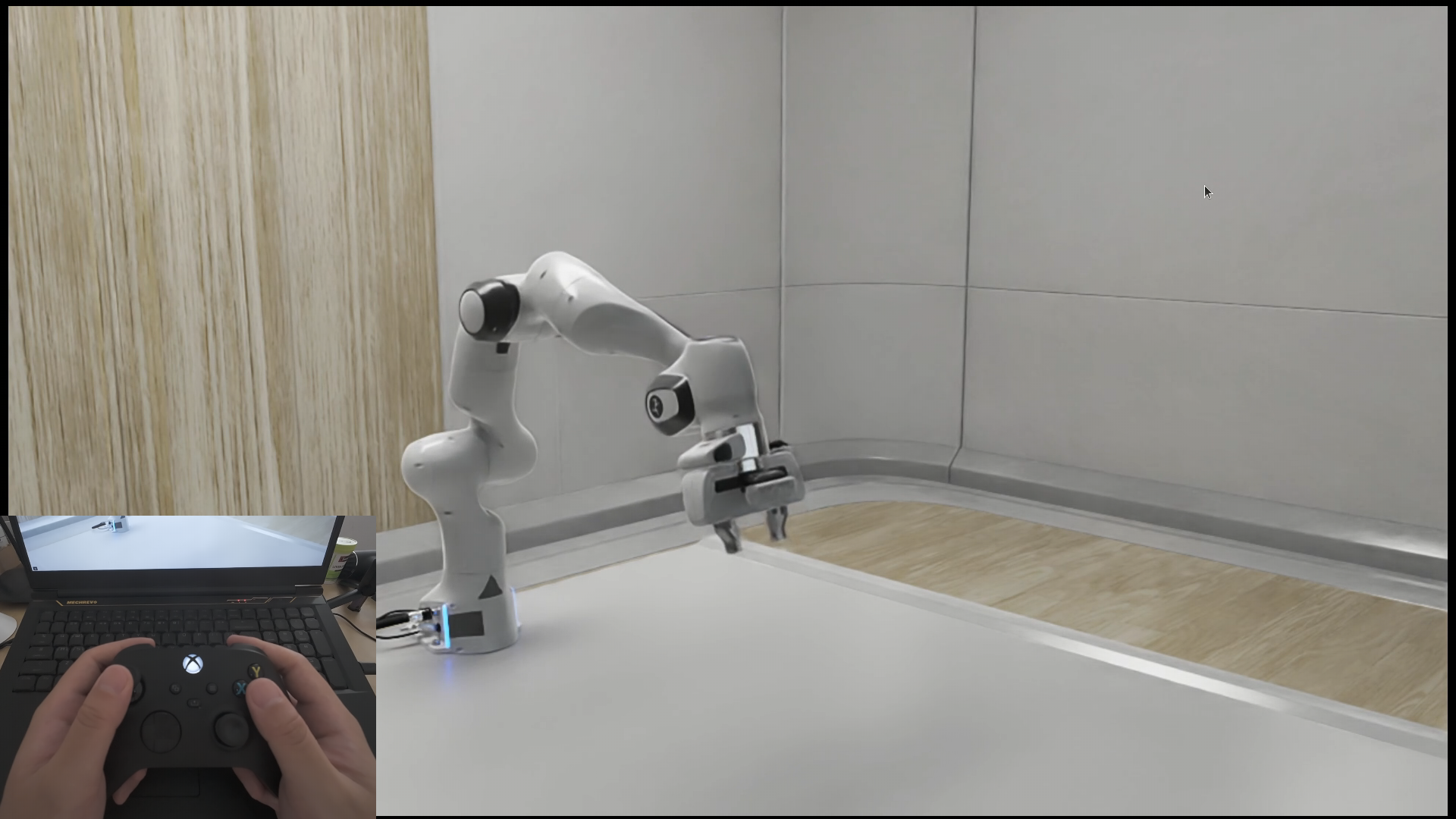
主导设计并独立实现基于Isaac Sim的仿真平台,成功构建Xbox手柄对阿克曼转向机器人及Franka机械臂的实时、精确控制链路,实现了轮式机器人流畅转向与多自由度机械臂末端精细操控(模拟抓取/放置)。

时间:2020.09 - 2023.04
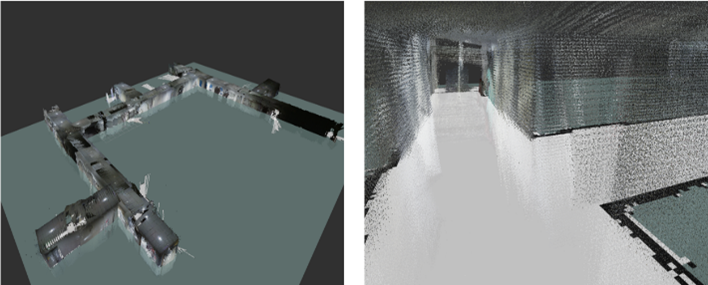
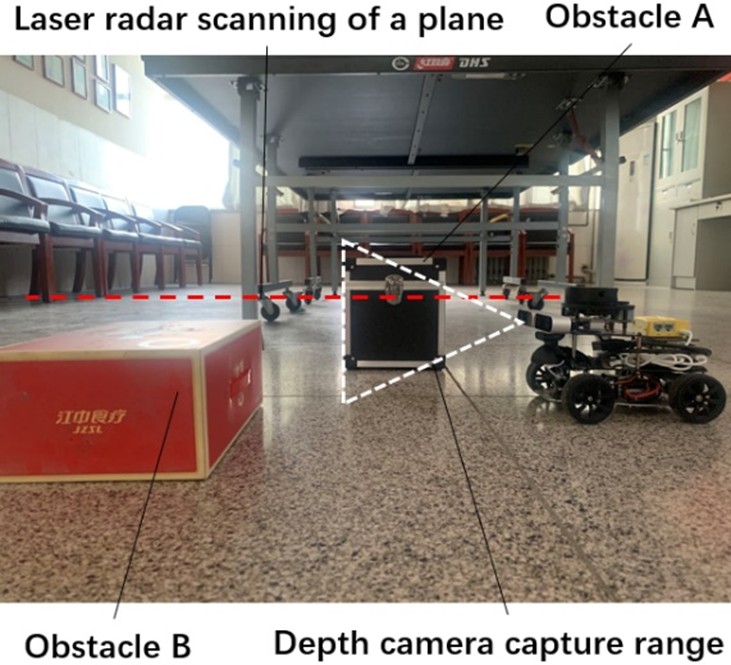
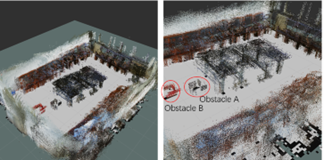
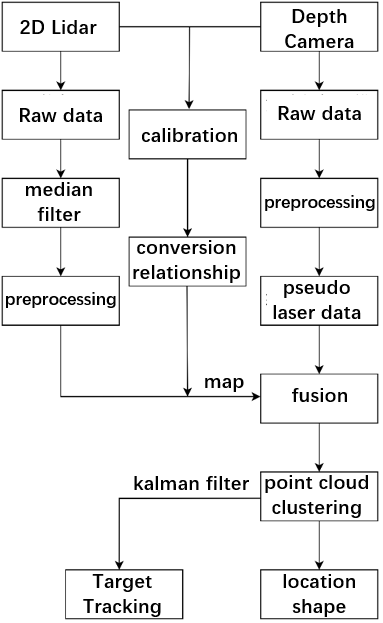
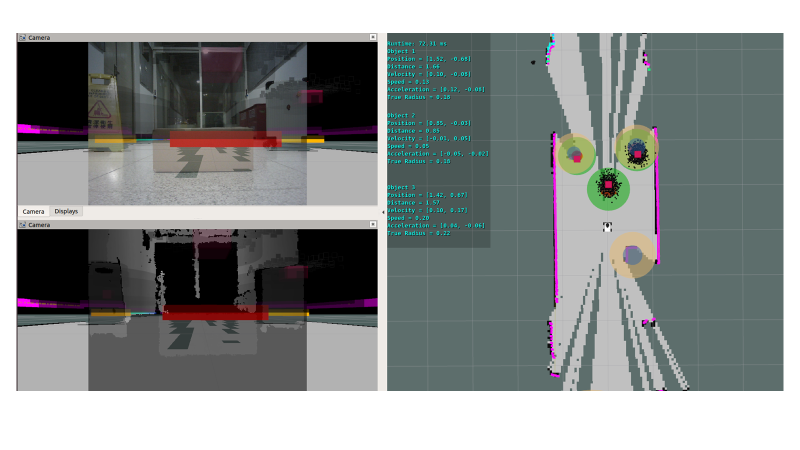
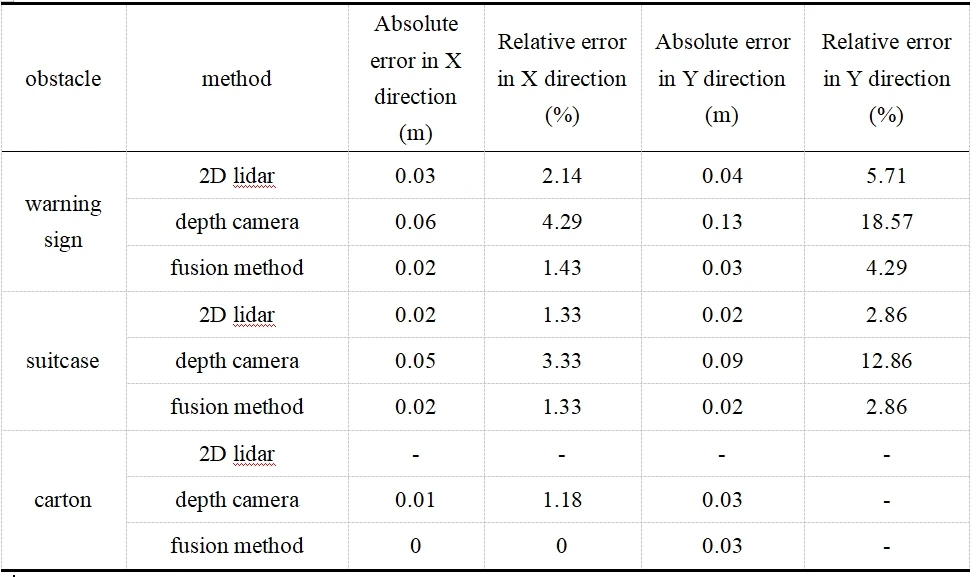
针对移动机器人自主导航需求,开发了一种基于2D激光雷达与RGB-D深度相机的高效多传感器融合SLAM及障碍物检测方法,旨在为机器人提供鲁棒且经济高效的环境理解能力,以支持其自主导航等任务。

时间:2022.07 - 2022.10 (实习 @ 澳特拉斯(北京)科技有限公司 )
参与全膝置换术(TKA)骨科手术机器人的研发 获“优秀实习生”
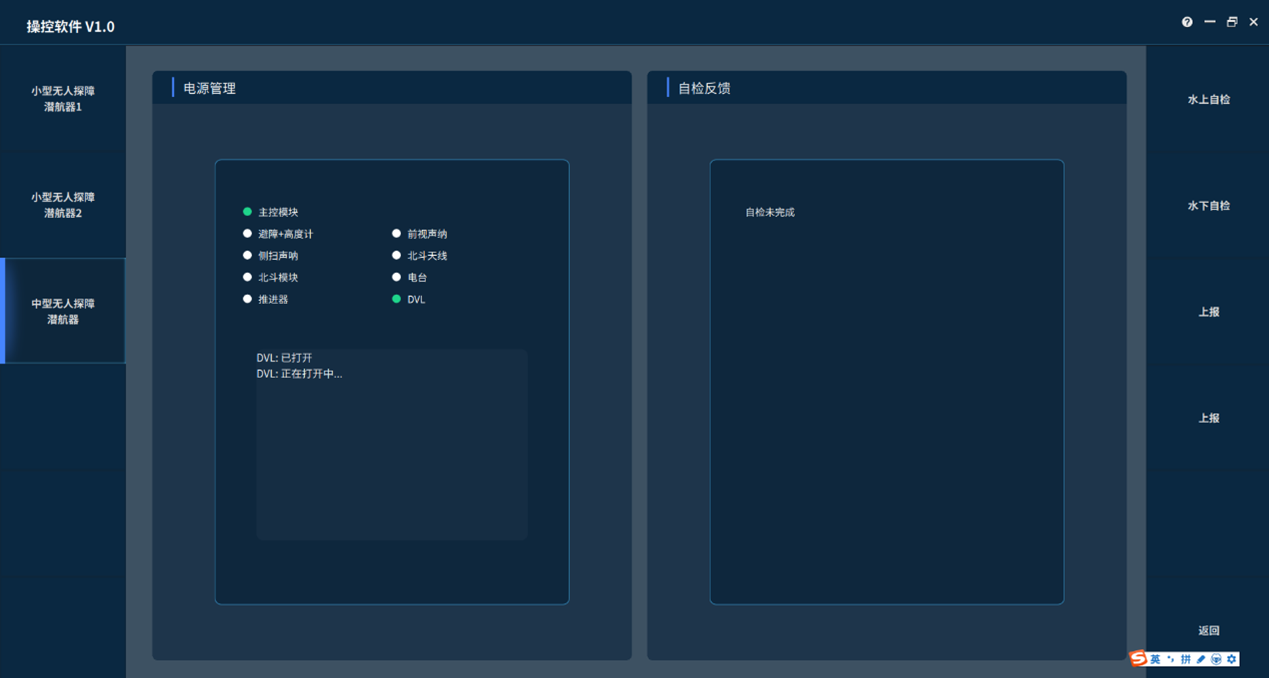
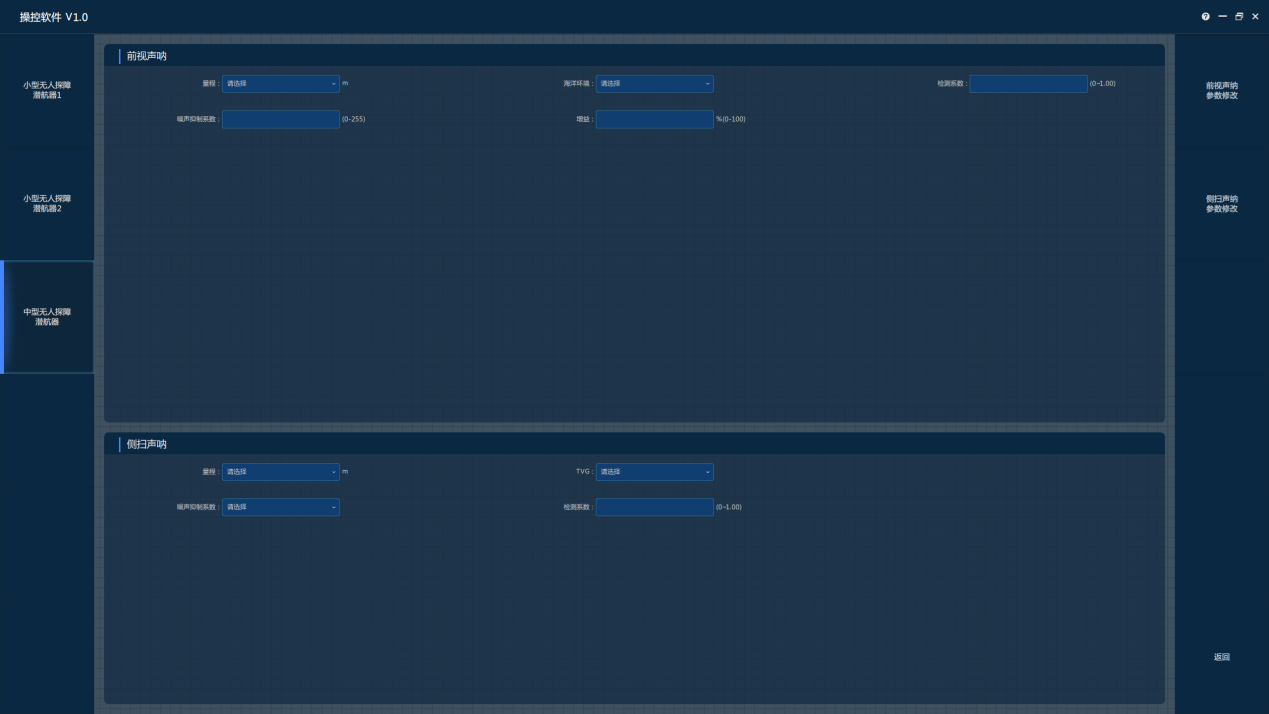
时间:2024.04 - 至今 (中国电科三所)
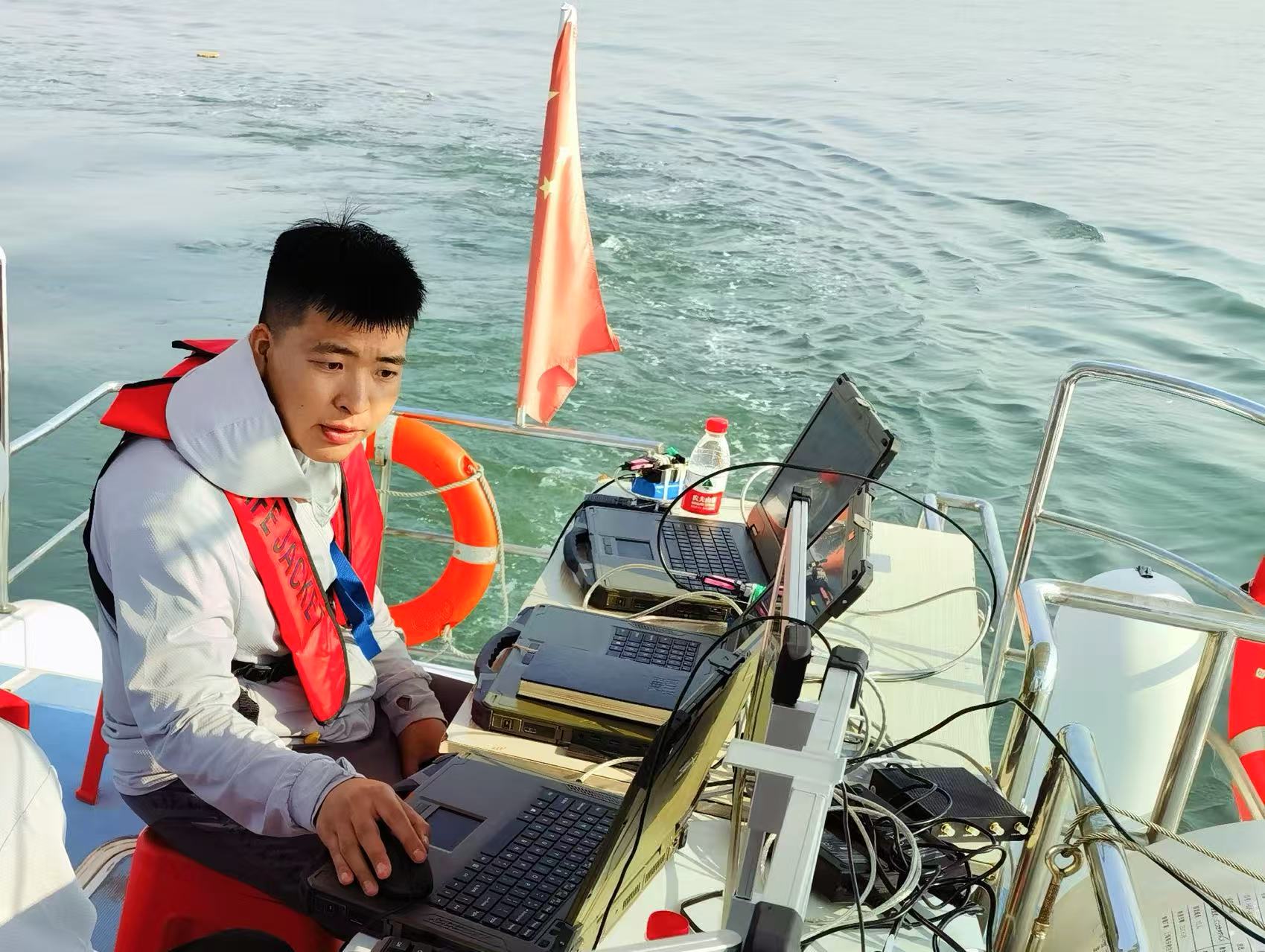
深度参与无人探障航潜航器 (UUV) 软件系统的核心研发,包括地面操控软件和潜航器主控软件,旨在实现潜航器的远程操控、状态监控、任务规划、自主航行及中小协同作业能力。 已获得比测第一名顺利进入研制阶段


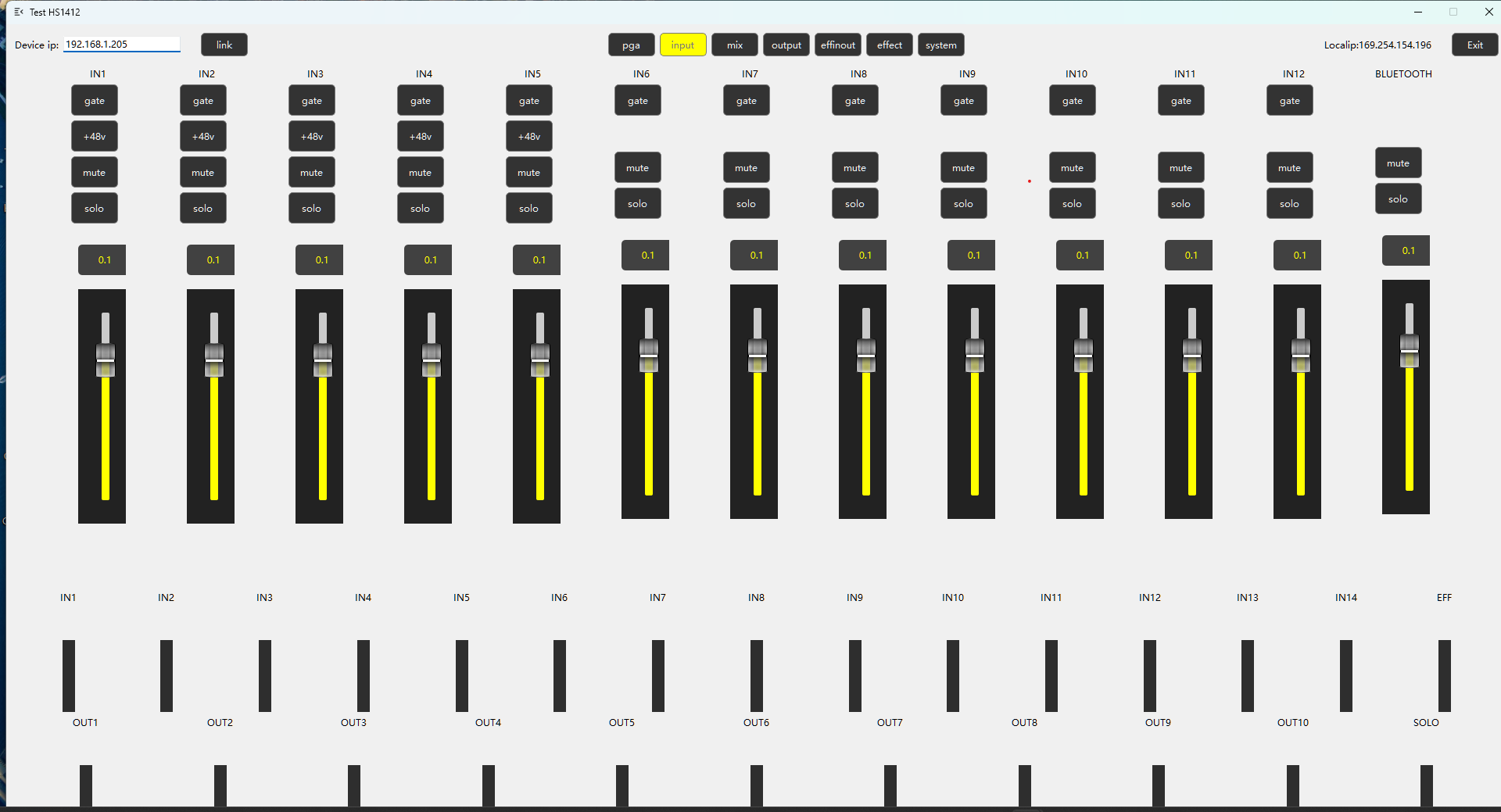
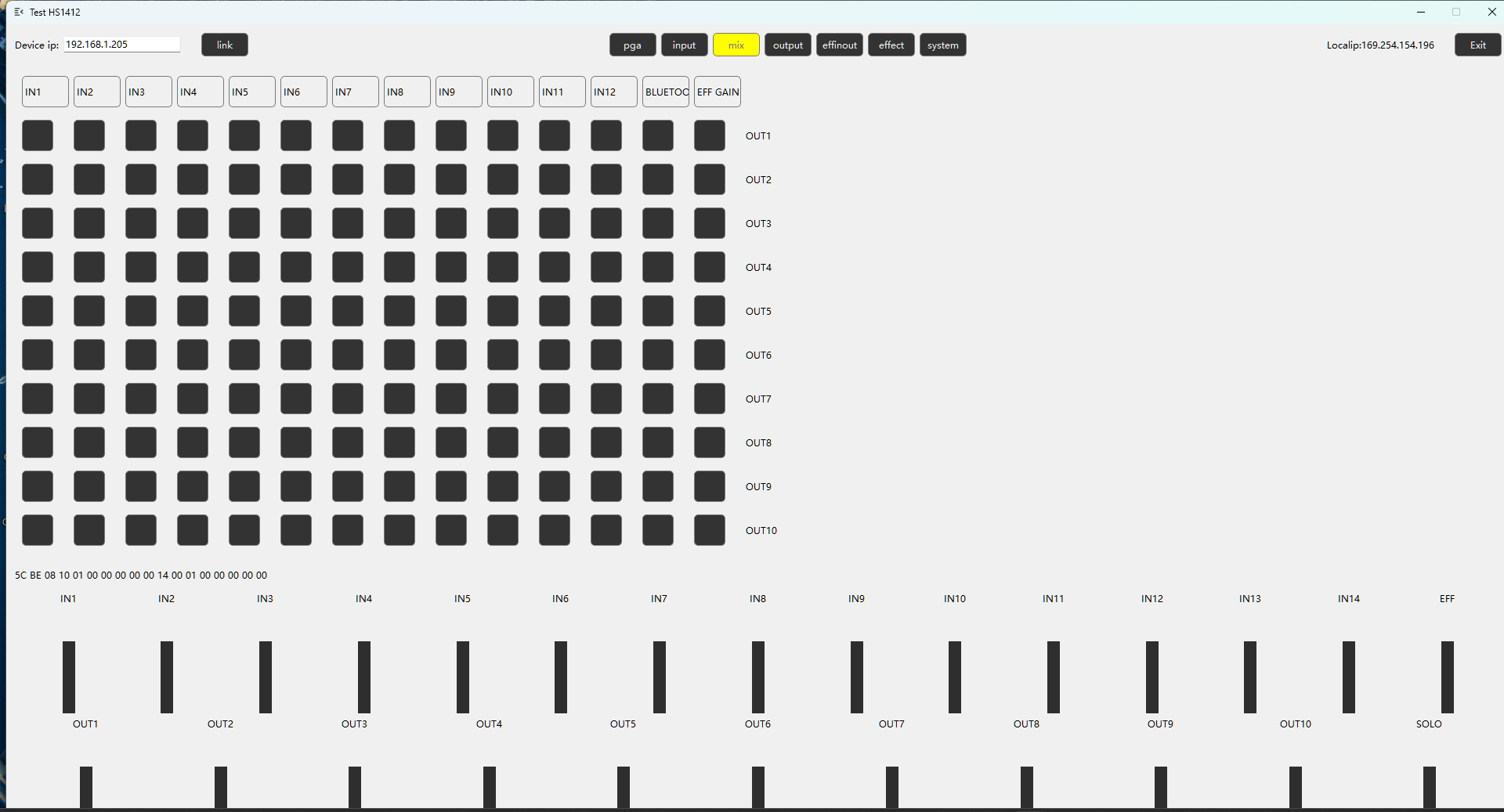
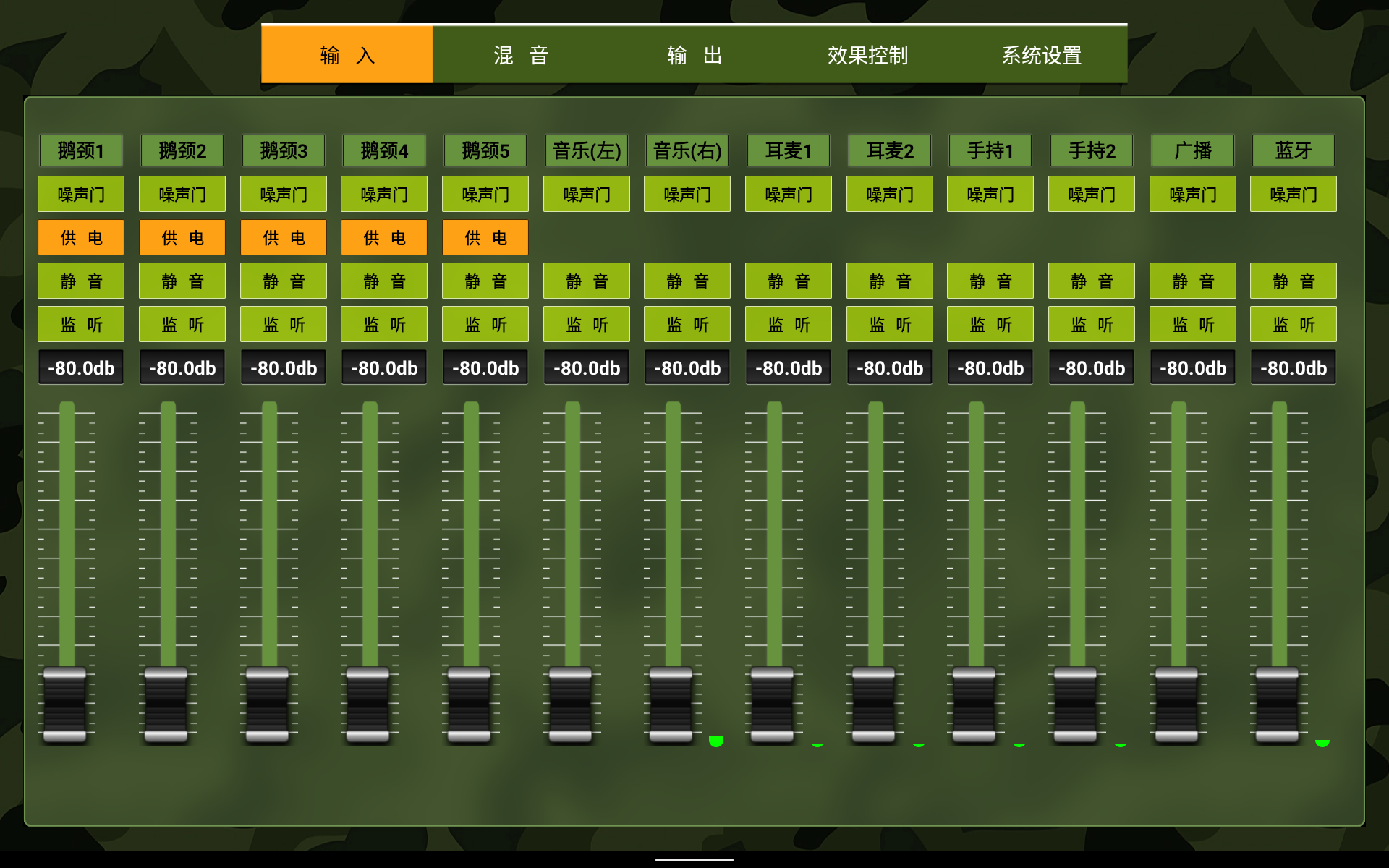
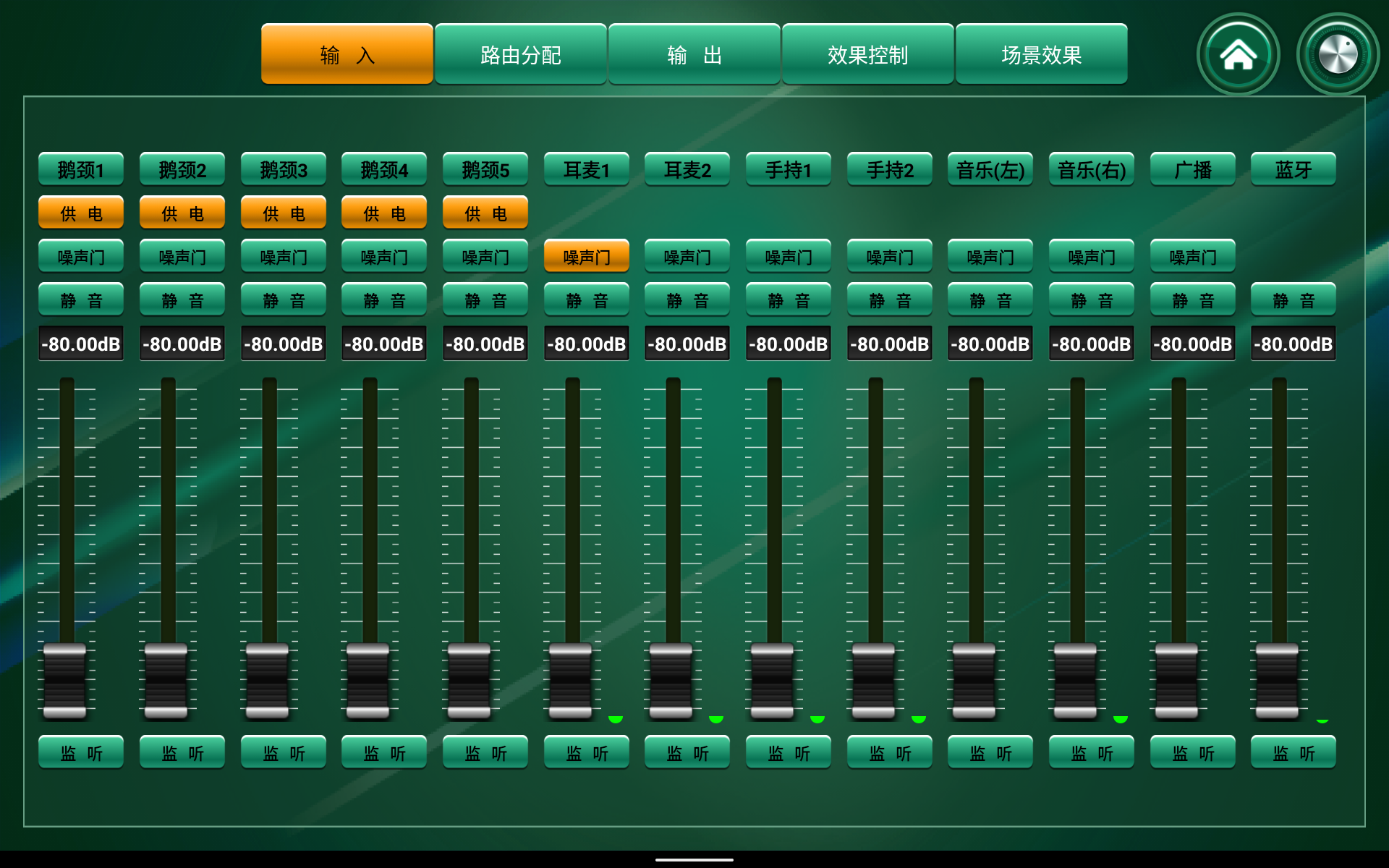
时间:2023.07 - 2024.03 (中国电科三所)
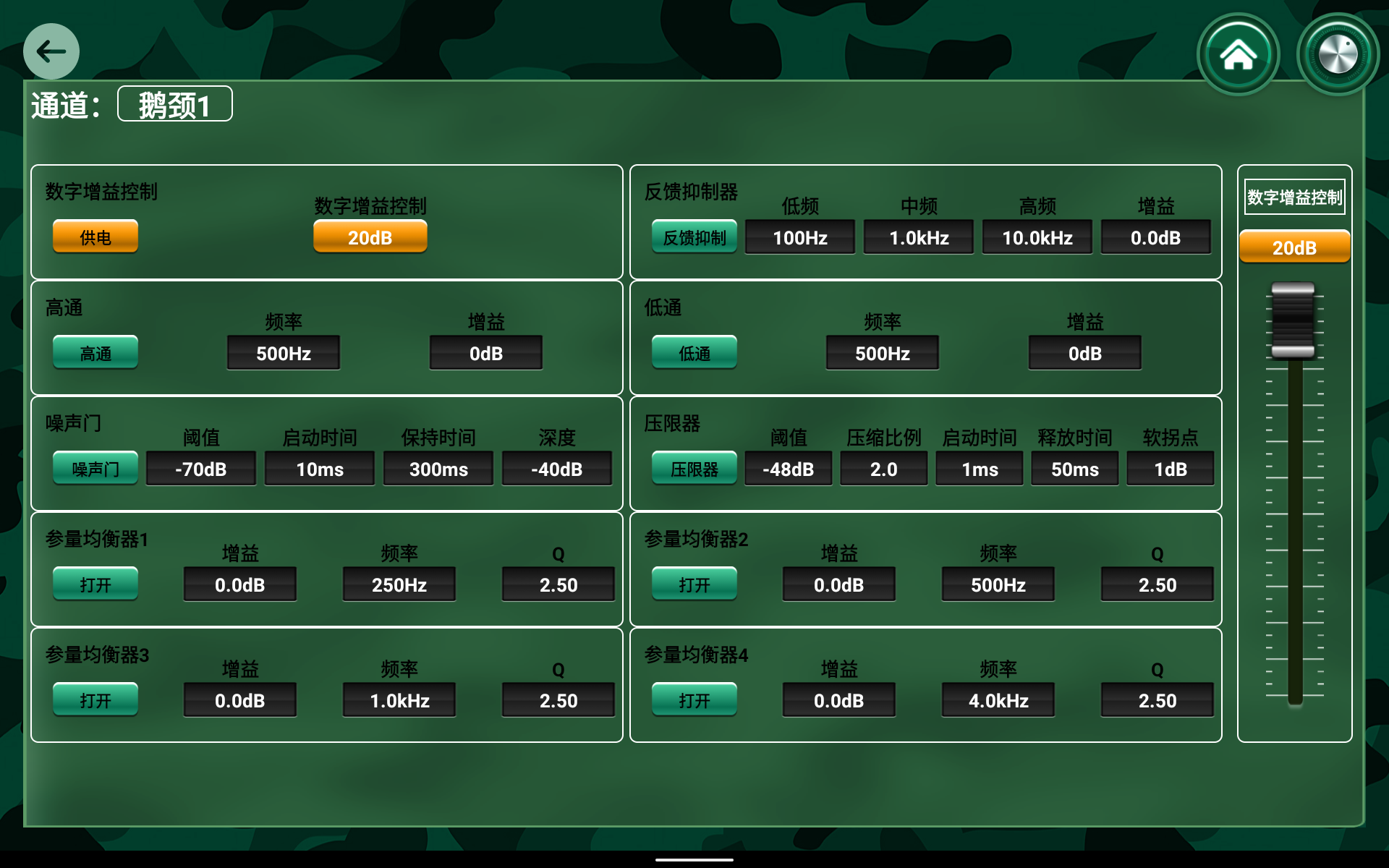
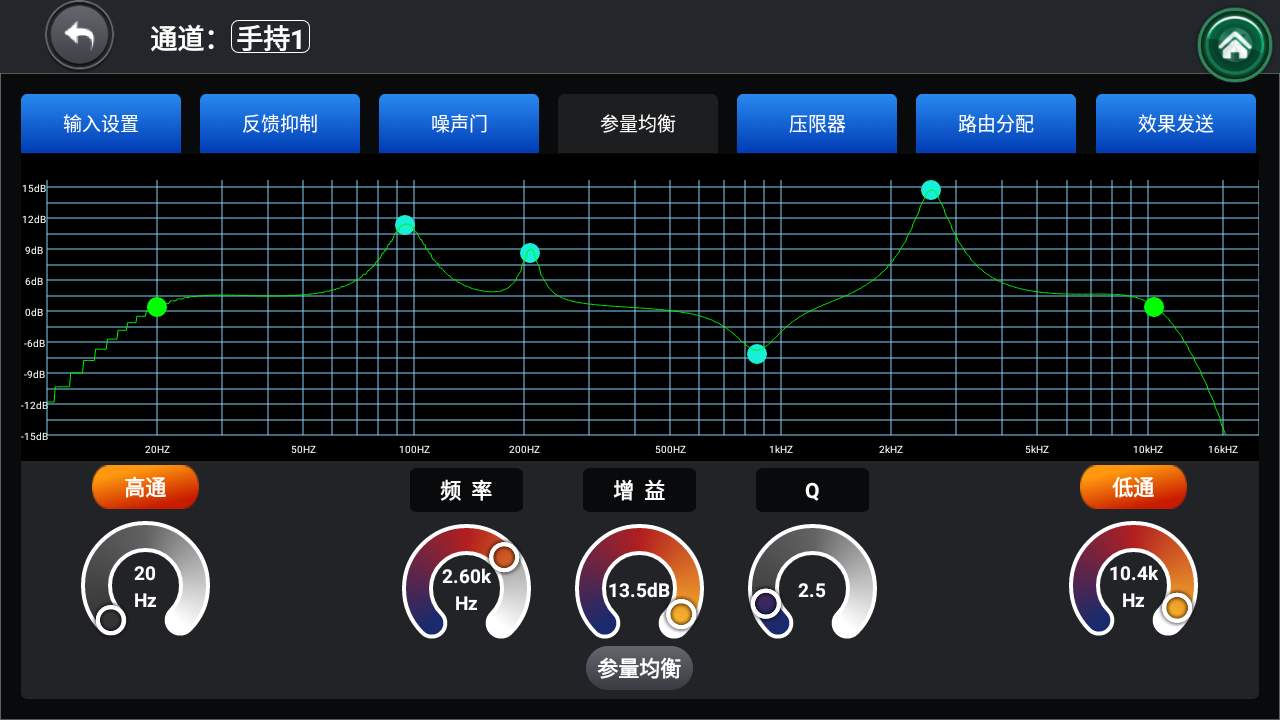
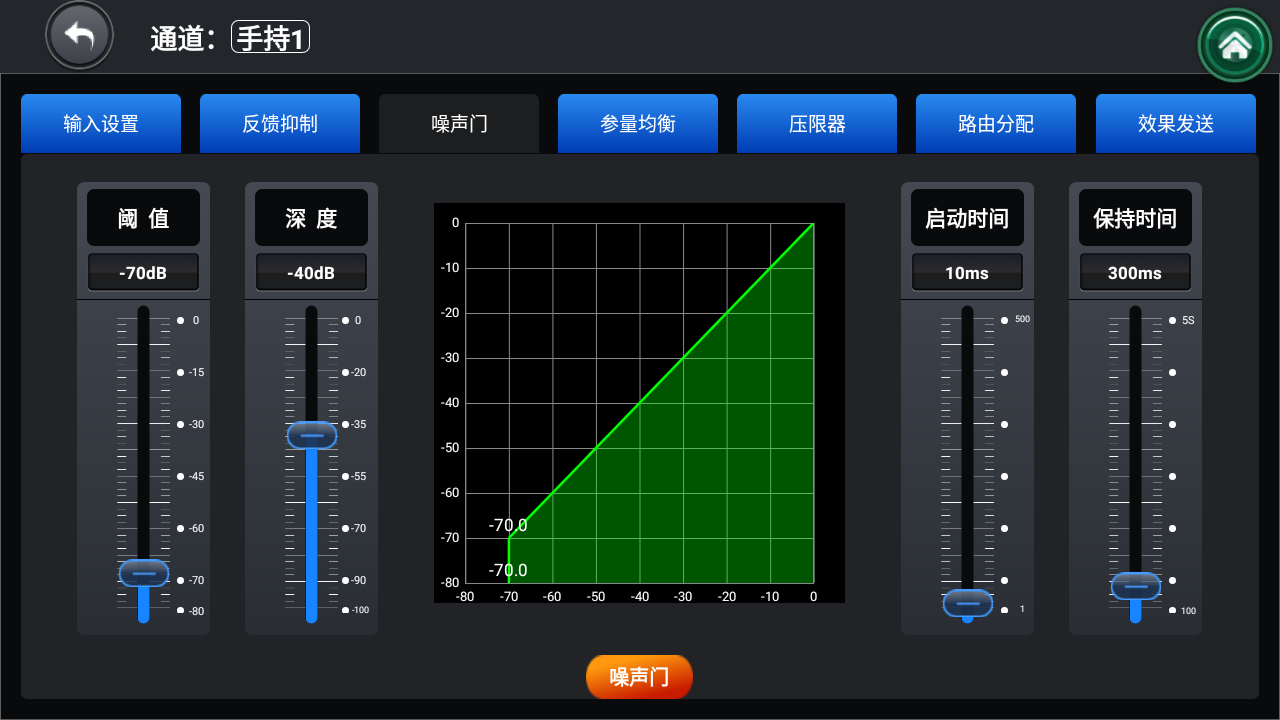
深度参与为某军方陆军政治工作部宣传局研制的数字集成影音系统项目,负责核心 Android 软件的研发工作。 已成功将374套设备交付到各个省份地区的营级单位,我负责的相关软件模块无任何反馈问题。